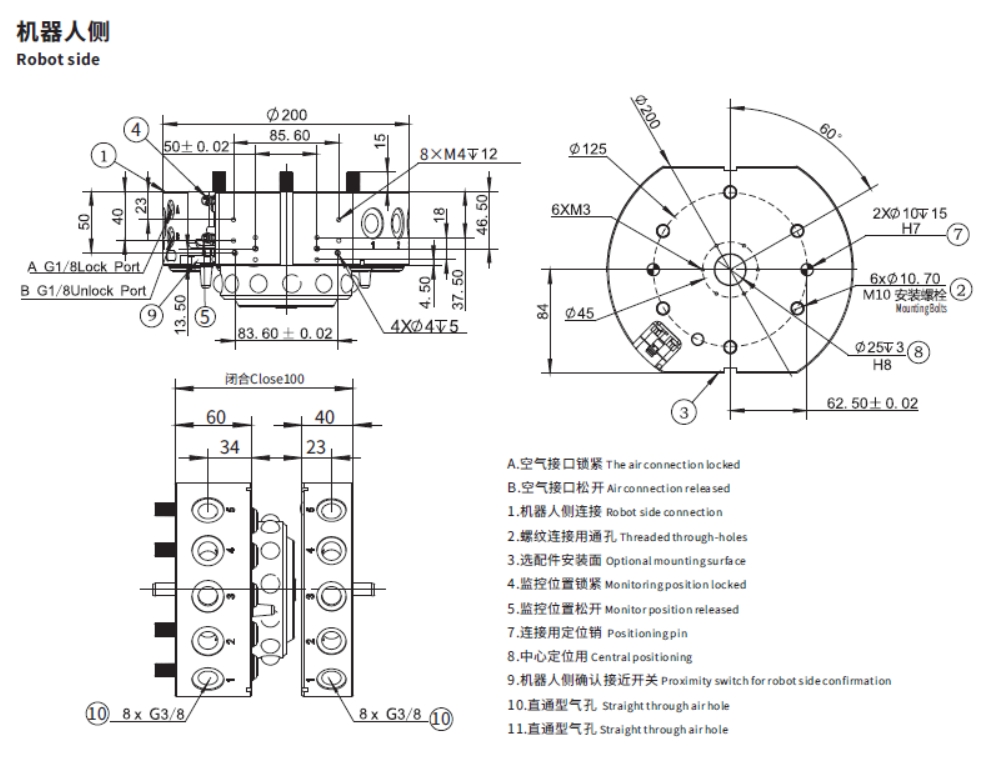
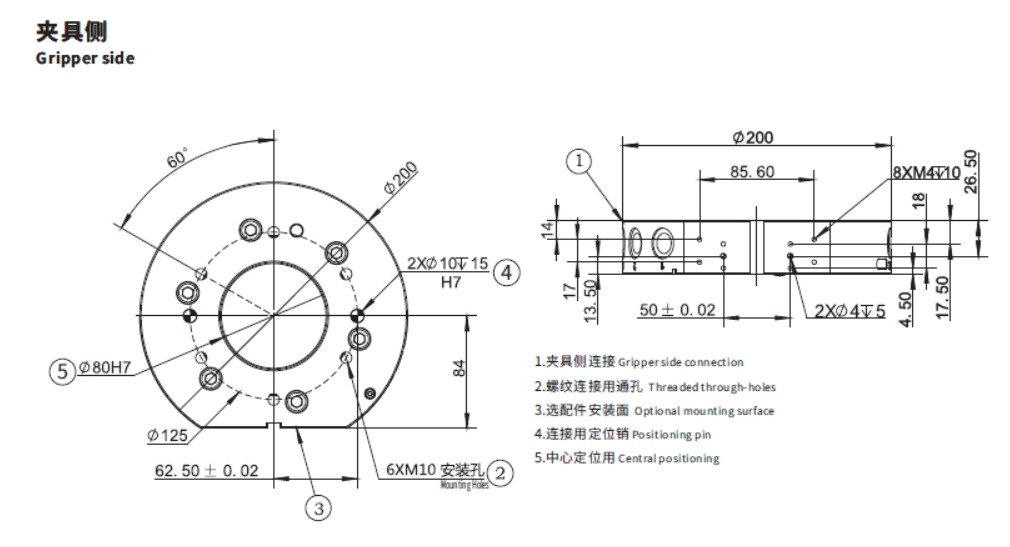
ANDIAN-DAHATSORATRA FANOVANA HAINGANA – QCA-200-D1 Fitaovana Fanovana Haingana eo amin'ny faran'ny Robot


Sokajy fototra
Mpanova Fitaovana Robot / Mpanova Fitaovana End-of-Arm (EOAT) / Rafitra Fanovana Haingana / Mpanova Fitaovana Mandeha Ho Azy / Interface Fitaovana Robot / Lafiny Robot / Lafiny Gripper / Fahaiza-miovaova amin'ny Fitaovana / Famotsorana Haingana / Mpanova Fitaovana Pneumatic / Mpanova Fitaovana Elektrika / Mpanova Fitaovana Hidraolika / Mpanova Fitaovana Precise / Mekanisma Hidiana Fiarovana / Mpandrindra End / Mandeha Ho Azy / Fahombiazan'ny Fanovana Fitaovana / Fifanakalozana Fitaovana / Mandeha Ho Azy Indostrialy / Fitaovana Robot End-of-Arm / Famolavolana Modular
Fampiharana
Ny End-of-Arm Tooling (EOAT) dia ampiasaina betsaka amin'ny indostria toy ny fanamboarana fiara, elektronika 3C, logistika, fanamboarana tsindrona, fonosana sakafo sy fanafody, ary fanodinana metaly. Ny asany lehibe dia ny fikirakirana ny workpiece, ny fametahana, ny famafazana, ny fanaraha-maso ary ny fanovana haingana ny fitaovana. Ny EOAT dia manatsara be ny fahombiazan'ny famokarana, ny fahaiza-milefitra ary ny kalitaon'ny vokatra, ka mahatonga azy io ho ampahany manan-danja amin'ny automation indostrialy maoderina.
endri-javatra
Fahitsiana avo lenta
Ny ilan'ny piston adjusting gripper dia mitana ny anjara asan'ny fametrahana, izay manome fahamarinan'ny fametrahana miverimberina avo lenta. Ny fitsapana tsingerina iray tapitrisa dia mampiseho fa ny tena fahamarinan'ny fihodinana dia ambony lavitra noho ny sanda atolotra.
Tanjaka avo lenta
Matanjaka ny herin'ny hidin'ny piston mihidy manana savaivony cylindre lehibe, ary matanjaka ny fahafahan'ny fitaovana SCIC robot fast manohitra ny torque. Rehefa mihidy dia tsy hisy hovitrovitra noho ny fihetsehana haingam-pandeha, ka misoroka ny tsy fahombiazan'ny hidin-trano ary miantoka ny fahamarinan'ny toerana miverimberina.
Fahombiazana avo lenta
Ny mekanisma hidin-trano misy endrika kônina maro, singa famehezana maharitra ela ary fitaovana fifandraisana elastika avo lenta no ampiasaina mba hahazoana antoka fa mifandray akaiky ny môdely famantarana.



Paramètre famaritana
| Andian-dahatsoratra Mpanova Haingana | ||||
| MODELY | Entana ambony indrindra | Lalan'ny entona | Hery fanidiana @ 80Psi (5.5Bar) | Lanjan'ny vokatra |
| QCA-05 | 5kg | 6-M5 | 620N | 0.4kg |
| QCA-05 | 5kg | 6-M5 | 620N | 0.3kg |
| QCA-15 | 15kg | 6-M5 | 1150N | 0.3kg |
| QCA-25 | 25kg | 12-M5 | 2400N | 1.0kg |
| QCA-35 | 35kg | 8-G1/8 | 2900N | 1.4kg |
| QCA-50 | 50kg | 9-G1/8 | 4600N | 1.7kg |
| QCA-S50 | 50kg | 8-G1/8 | 5650N | 1.9kg |
| QCA-100 | 100kg | 7-G3/8 | 12000N | 5.2kg |
| QCA-S100 | 100kg | 5-G3/8 | 12000N | 3.7kg |
| QCA-S150 | 150kg | 8-G3/8 | 12000N | 6.2kg |
| QCA-200 | 300kg | 12-G3/8 | 16000N | 9.0kg |
| QCA-200D1 | 300kg | 8-G3/8 | 16000N | 9.0kg |
| QCA-S350 | 350kg | / | 31000N | 9.4kg |
| QCA-S500 | 500kg | / | 37800N | 23.4kg |

Lafiny robot

Lafiny mpihazona
Module azo ampiharina
Karazana môdioly
| Anaran'ny vokatra | MODELY | PN | Voltazy miasa | Miasa amin'izao fotoana izao | Mpampitohy | Mpampitohy PN |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-15R2 | 7.Y00468 | 24V | 2.5A | D-Sub15R2-1000① | 1.Y10080 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-15G2 | 7.Y00469 | 24V | 2.5A | D-Sub15G2-1000① | 1.Y10081 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S2 | 1.Y10710 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P2 | 1.Y10711 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y2 | 1.Y11420 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B2 | 1.Y11863 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y2 | 1.Y11420 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B2 | 1.Y11863 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y2 | 1.Y11419 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B2 | 1.Y11864 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y2 | 1.Y11867 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B2 | 1.Y11865 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y2 | 1.Y11369 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B2 | 1.Y11866 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y2 | 1.Y11369 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B2 | 1.Y11866 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S2 | 1.Y13392 |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S2 | 1.Y13393 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P2 | 1.Y13394 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P2 | 1.Y13395 |
①1 metatra ny halavan'ny tariby ②Tambajotra ihany, tsy misy tariby
Module fanitarana pneomatika
| Anaran'ny vokatra | MODELY | PN | Lalan'ny Gaz | Lavaka misy kofehy |
| Module fanitarana pneomatika amin'ny lafiny robot | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Module fanitarana pneomatika amin'ny lafiny gripper | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Module fanitarana pneomatika amin'ny lafiny robot | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Module fanitarana pneomatika amin'ny lafiny gripper | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Module fanitarana pneomatika amin'ny lafiny robot | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Module fanitarana pneomatika amin'ny lafiny gripper | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Module fanitarana pneomatika amin'ny lafiny robot | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Module fanitarana pneomatika amin'ny lafiny gripper | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Môdioly fanitarana pneomatika amin'ny lafiny robot izay milaza tena ho azy | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Module Fanitarana Pneumatic amin'ny lafiny Gripper izay nambara ho azy | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Module fanitarana pneomatika amin'ny lafiny robot | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Module fanitarana pneomatika amin'ny lafiny gripper | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Karazana Môdioly Matetika Avo
| Anaran'ny vokatra | MODELY | PN | Voltazy miasa | Miasa amin'izao fotoana izao |
| Môdiolan'ny famantarana avy amin'ny lafiny robot | QCHFM-E14-C1R | 7.Y02003 | 1.4KV | 5A |
| Module famantarana amin'ny lafiny Gripper | QCHFM-E14-C1G | 7.Y02004 | 1.4KV | 5A |
Môdiolan'ny famantarana (interface tariby tambajotra)
| Anaran'ny vokatra | MODELY | PN |
| Môdioly famantarana avy amin'ny lafiny robot | QCSM-RJ45-06R | 7.Y02007 |
| Môdio famantarana amin'ny lafiny Gripper | QCSM-RJ45-06G | 7.Y02008 |
Module Herinaratra Servo
| Anaran'ny vokatra | MODELY | PN |
| Môdiolan'ny herinaratra servo amin'ny lafiny robot | QCSM-08R1 | 7.Y02080 |
| Module herinaratra servo amin'ny lafiny gripper | QCSM-08G1 | 7.Y02081 |
Môdiolan'ny famantarana Servo
| Anaran'ny vokatra | MODELY | PN |
| Môdio famantarana servo amin'ny lafiny robot | QCSM-12R | 7.Y02082 |
| Module famantarana servo amin'ny lafiny gripper | QCSM-12G | 7.Y02083 |
Môdiolan'ny Rivotra Mametaka Tena
| Anaran'ny vokatra | MODELY | PN |
| Môdioly famantarana avy amin'ny lafiny robot | QCWM-02R | 7.Y02049 |
| Môdio famantarana amin'ny lafiny Gripper | QCWM-02G | 7.Y02050 |
Ny orinasanay


Sokajy vokatra
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

ANDIAN-DAHATSORATRA FANOVANA HAINGANA – QCA-S100 A C Haingana...
-

ANDIAN-DAHATSORATRA FANOVANA HAINGANA – QCA-25 Fanovana haingana...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER AG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...